


FreeRTOS - použití a nástrahy časovačů
Tento návod je určený pro mírně pokročilé uživatele operačního systému pro mikrokrokontrolery FreeRTOS. Příklad pracuje s kontrolerem STM32L073RZ a vývojovým prostředím STM32CubeIDE.
Tento příklad ukáže, jakým způsobem spustit, zastavit či resetovat časovače. Dále uvidíme, jak nevyzpytatelně se časovače mohou chovat, když je s nimi špatně zacházeno.
Program bude každou sekundu vypisovat znak „1“, každé dvě sekundy znak „2“ a jednorázově 4 sekundy po startu programu vypíše znak „3“. Odesláním jakéhokoliv znaku z PC do kontroleru se časovače resetují a znovu spustí. To znamená, že pokud mikrokontroler bude přijímat znaky z PC častěji, než jednou za sekundu, neodešle žádná data. Výjimku bude tvořit přijatý znak „s“, který všechny časovače zastaví.
V našem programu si nejprve vytvoříme tři ukazatele na časovače, které budeme v jednom z vláken využívat na práci s nimi.
Dále vytvoříme callback funkce pro jednorázový a periodický časovač. Periodické časovače budou sdílet jednu callback funkci.
TimerHandle_t periodickyCasovac1 = NULL;
TimerHandle_t periodickyCasovac2 = NULL;
TimerHandle_t jednorazovyCasovac = NULL;
static void JednorazovyCallback(TimerHandle_t Casovac)
{
HAL_UART_Transmit(&huart2, "3", 1, 10);
}
static void PeriodickyCallback(TimerHandle_t Casovac)
{
uint8_t id = pvTimerGetTimerID(Casovac);
if(id == 1)
{
HAL_UART_Transmit(&huart2, "1", 1, 10);
}
else
{
HAL_UART_Transmit(&huart2, "2", 1, 10);
}
}
V callback funkci periodického časovače odesíláme rozdílný znak na základě toho, jakým časovačem byla funkce volána. Rozlišení bychom mohli provést buď porovnáním adresy ukazatele, nebo, jako v našem případě, pomocí identifikačního čísla časovače. K získání identifikátoru využijeme funkci
void *pvTimerGetTimerID(adresaCasovace), kde
adresaCasovace je adresa na časovače, jehož identifikátor chceme získat.
Funkce vrací ukazatel na void, který můžeme použít na jakýkoliv číselný datový typ.
Poté implementujeme uživatelské vlákno, které bude s časovači pracovat. Vlákno při svém vytvoření všechny časovače spustí a nastaví komunikaci UART na příjem jednoho znaku. Vlákno v nekonečné smyčce zastaví časovače v momentě, kdy kontroler přijme znak „s“. Při příjmu jakéhokoliv jiného znaku časovače resetuje (resetování časovače zároveň opět spustí).
static void TaskCasovace( void *pvParameters )
{
uint8_t data = 0U;
xTimerStart(periodickyCasovac1, pdMS_TO_TICKS(1));
xTimerStart(periodickyCasovac2, pdMS_TO_TICKS(1));
xTimerStart(jednorazovyCasovac, pdMS_TO_TICKS(1));
HAL_UART_Receive_IT(&huart2, &data, 1);
while(1)
{
// prisel znak na zastaveni casovacu
if(data == 's')
{
xTimerStop(periodickyCasovac1, pdMS_TO_TICKS(1));
xTimerStop(periodickyCasovac2, pdMS_TO_TICKS(1));
xTimerStop(jednorazovyCasovac, pdMS_TO_TICKS(1));
HAL_UART_Receive_IT(&huart2, &data, 1);
data = 0U;
}
// prisla jakakoliv jina data
else if(data != 0U)
{
// resetuje periodicke casovace
xTimerReset(periodickyCasovac1, pdMS_TO_TICKS(1));
xTimerReset(periodickyCasovac2, pdMS_TO_TICKS(1));
// resetuje jednorazovy casovac
xTimerReset(periodickyCasovac2, pdMS_TO_TICKS(1));
HAL_UART_Receive_IT(&huart2, &data, 1);
data = 0U;
}
}
}
Vlákno používá funkce na spuštění, zastavení a resetování časovače. Všechny mají stejné vstupní parametry, proto popíšeme pouze funkci na spuštění:
BaseType_t xTimerStart(adresaCasovace, pocetCasovychUseku), kde
adresaCasovace je adresa časovače, který chceme spustit, a
pocetCasovychUseku je maximální počet časových úseků, po které bude funkci volající vlákno zablokováno, než se zařadí příkaz ke spuštění časovače do fronty. Poté bude vlákno odblokováno.
Návratová hodnota má hodnoty pdPASS nebo pdFAIL podle toho, zda se v daném maximálním počtu časových úseků povedlo zařadit příkaz do fronty příkazů časovačů.
Nyní v hlavním programu vytvoříme tři časovače a jedno vlákno.
/* USER CODE BEGIN RTOS_THREADS */
periodickyCasovac1 = xTimerCreate("Periodicky1", pdMS_TO_TICKS(1000), pdTRUE, 1, PeriodickyCallback);
periodickyCasovac2 = xTimerCreate("Periodicky2", pdMS_TO_TICKS(2000), pdTRUE, 2, PeriodickyCallback);
jednorazovyCasovac = xTimerCreate("Jednorazovy", pdMS_TO_TICKS(4000), pdFALSE, 1, JednorazovyCallback);
BaseType_t status = xTaskCreate(TaskCasovace, "Task casovace", 128, NULL, 1, NULL);
if(status != pdPASS)
{
HAL_UART_Transmit(&huart2, "Plna pamet", 10, 100);
while(1);
}
/* USER CODE END RTOS_THREADS */
/* Start scheduler */
osKernelStart();
K vytvoření časovače využíváme funkci
TimerHandle_t xTimerCreate(*uzivatelkeJmeno, perioda, autoReload, identifikator, adresaCallbackFunkce), kde
*uzivatelskeJmeno je ukazatel na řetězec s uživatelským jménem,
perioda udává počet časových úseků, než dojde k přetečení časovače,
autoReload určuje, že bude časovač periodický (vložením hodnoty pdTRUE) či jednorázový (vložením hodnoty pdFALSE),
identifikator je identifikátor časovače a
adresaCallbackFunkce je adresa callback funkce, která se zavolá při přetečení časovače.
Funkce vrací adresu na vytvořený časovač. Pokud je návratová hodnota NULL, není pro nový časovač místo v paměti. Periodické časovače našeho programu mají periodu 1000 a 2000 ms a mají rozdílné identifikátory. Jednorázový časovač má periodu 4000 ms. Časovačům jsme posledním argumentem určili, jakou callback funkci mají používat.
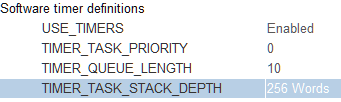
Předtím, než program přeložíme, musíme v konfigurátoru povolit používání časovačů, což provedeme následující změnou:
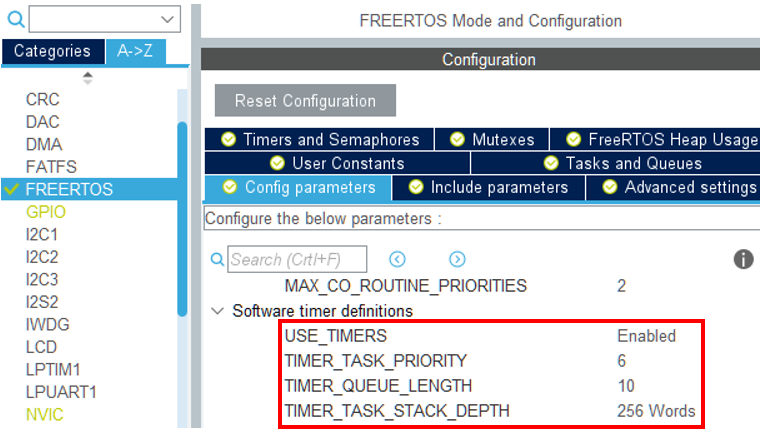
Je doporučené, aby vlákna časovačů měla nejvyšší možnou prioritu (configTIMER_TASK_PRIORITY). Parametr configTIMER_QUEUE_LENGTH určuje velikost fronty příkazů. Později si ukážeme důvod.
Textový výstup může vypadat následovně:
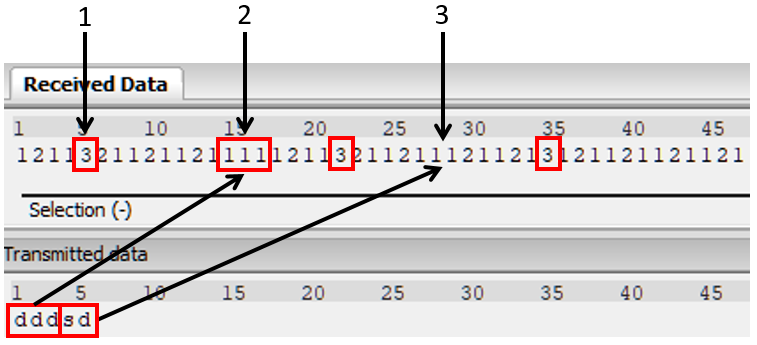
Sekundu po spuštění programu se odešle první znak „1“, po druhé sekundě dva znaky „21“, jelikož přetekly dva časovače zároveň. Po třetí sekundě opět pouze „1“. V bodě (1), který odpovídá čtvrté sekundě běhu programu, přeteče jednorázový časovač. Vypisuje se tedy text „321“. To se po dalších 4 sekundách již neopakuje. Po čtvrté sekundě v bodě (2) odešleme z PC postupně se sekundovým odstupem 3x libovolný znak (v tomto případě 3x „d“). To způsobí třikrát reset všech časovačů. Jelikož je odstup znaků přibližně jedna sekunda, pouze časovač s kratší periodou stíhá přetéct a vypisovat znaky „1“. Čtyři sekundy po posledním resetu jednorázový časovač opět pošle znak „3“. v Bodě (3) PC odešle znak „s“. Od tohoto momentu časovače nefungují a příjem znaků se zastaví. Po nějaké chvíli kontroler přijme libovolný znak, což všechny časovače resetuje a opět spustí. Tento další reset způsobil tři znaky „1“ v řadě. Po 4 sekundách se opět ozve jednorázový časovač. V této ukázce však již naposledy.
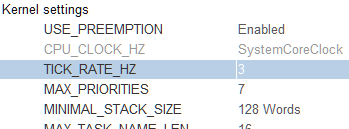
Změňme nyní délku časového úseku běhu vlákna. Místo jedné milisekundy (1 KHz) bude trvat 333 ms (3 Hz).
Dále přidejme do callback funkce přepínání LED. Konkrétněji do části, která se provede při přetečení periodického časovače 1.
static void PeriodickyCallback(TimerHandle_t Casovac)
{
uint8_t id = pvTimerGetTimerID(Casovac);
if(id == 1)
{
HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_5);
HAL_UART_Transmit(&huart2, "1", 1, 10);
}
else
{
HAL_UART_Transmit(&huart2, "2", 1, 10);
}
}
Poslední úpravou je změna periody periodického časovače 1 na 1500 ms.
periodickyCasovac1 = xTimerCreate("Periodicky1", pdMS_TO_TICKS(1500), pdTRUE, 1, PeriodickyCallback);
Po spuštění získáme následující výstupní signál:

Očekávali jsme přepínání úrovně signálu každých 1500 ms, ale jak na obrázku vidíme, i časovače jsou zatížené rozlišovací schopností. Ta je závislá na délce časového úseku běhu vlákna. Jelikož 1500 a 333 ms nejsou soudělné hodnoty, pomocí volaného makra se čas převede na 4 časové úseky, které tvoří přibližně 1333 ms. Toto je potřeba při programování zohlednit.
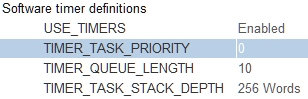
Nyní pojďme upravit prioritu stínového vlákna. (Stínové vlákno je automaticky vytvořené vlákno běžicí na pozadí a obsluhující události časovačů) Změníme ji na úroveň 0, tedy nižší než má uživatelské vlákno.
Když program s takovýmto nastavením spustíme, stínové vlákno se nikdy nedostane ke slovu a nespustí se žádná callback funkce časovačů. Lékem je zablokování uživatelského vlákna v jeho nekonečné smyčce alespoň do konce časového úseku. Má to ale háček. Vlákno s vyšší prioritou může svým během zabrat více časových úseků, než se zablokuje. Upravme tedy uživatelské vlákno tak, že na konci iterace smyčky dva úseky pracuje (zpožďovací smyčka) a poté se na jeden úsek zablokuje:
static void TaskCasovace( void *pvParameters )
{
uint8_t data = 0U;
xTimerStart(periodickyCasovac1, pdMS_TO_TICKS(1));
xTimerStart(periodickyCasovac2, pdMS_TO_TICKS(1));
xTimerStart(jednorazovyCasovac, pdMS_TO_TICKS(1));
HAL_UART_Receive_IT(&huart2, &data, 1);
while(1)
{
// prisel znak na zastaveni casovacu
if(data == 's')
{
xTimerStop(periodickyCasovac1, pdMS_TO_TICKS(1));
xTimerStop(periodickyCasovac2, pdMS_TO_TICKS(1));
xTimerStop(jednorazovyCasovac, pdMS_TO_TICKS(1));
HAL_UART_Receive_IT(&huart2, &data, 1);
data = 0U;
}
// prisla jakakoliv jina data
else if(data != 0U)
{
// resetuje periodicke casovace
xTimerReset(periodickyCasovac1, pdMS_TO_TICKS(1));
xTimerReset(periodickyCasovac2, pdMS_TO_TICKS(1));
// resetuje jednorazovy casovac
xTimerReset(periodickyCasovac2, pdMS_TO_TICKS(1));
HAL_UART_Receive_IT(&huart2, &data, 1);
data = 0U;
}
// zpozdeni 2 casove useky
HAL_Delay(1);
// zablokuje vlakno do konce useku
vTaskDelay(1);
}
}
Výstupní signál vypadá takto: (časovým úsekům zleva doprava odpovídají časové hodnoty shora dolů)
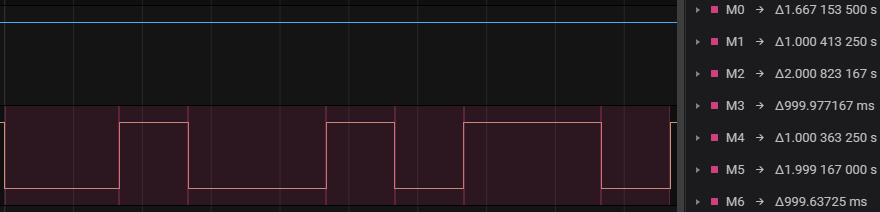
Výstupní signál je velmi neperiodický a chová se podivně. Jeho chování vysvětlí následující graf průběhů:
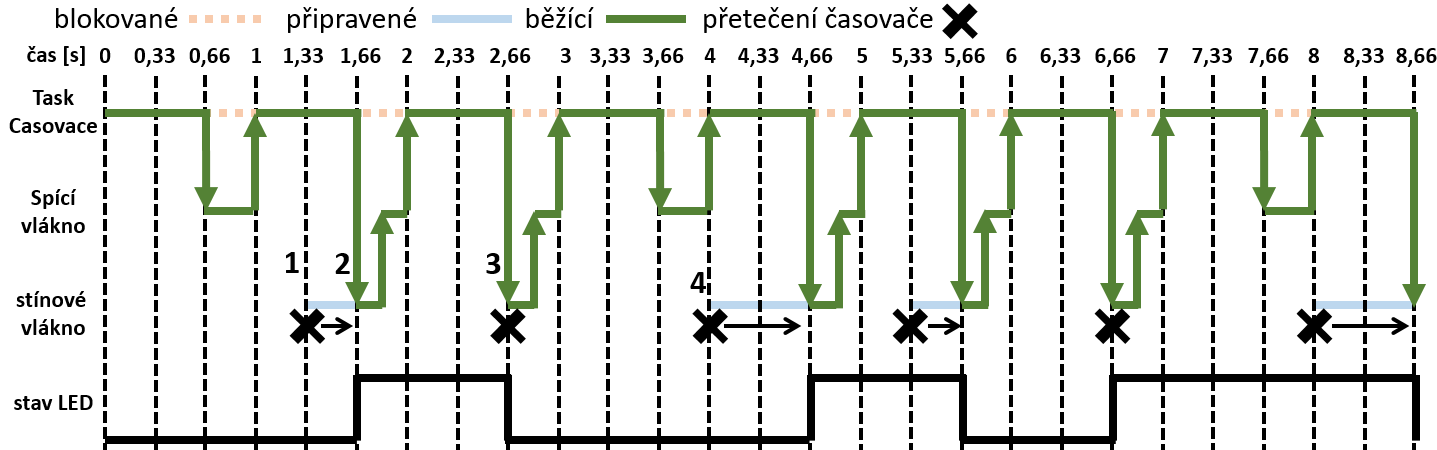
Program běží dle očekávání až do bodu (1), kdy dojde k přetečení časovače. Ve vláknu přechodu úseků se odešle příkaz do fronty k obsloužení časovače ve stínovém vláknu. Bohužel je ale nyní aktivní vlákno s vyšší prioritou, a proto se stínové vlákno dostane ke slovu o jeden časový úsek později v bodě (2). Teprve v ten moment se zavolá callback funkce a přepne se stav LED. V bodě (3) shodou okolností dojde k přetečení časovače a zablokovaní vlákna TaskCasovace ve stejný okamžik. Obsluha časovače se tedy provede okamžitě. V bodě (4) dojde k přetečení a konce blokace uživatelského vlákna ve stejný moment, plánovací algoritmus tedy aktivuje uživatelské vlákno. Stínové vlákno s obsluhou časovače nyní musí čekat na běh další dva časové úseky. Průběh ve stejném duchu pokračuje dál.
Mějme na vědomí, že zpoždění se netýká pouze volání callback funkcí, které jako jediné v tomto příkladu používáme. Stejný problém nastane i u veškerých knihovních funkcí, které pracují s časovači (zapnutí, vypnutí, reset…).
Udělejme poslední změnu. Uživatelské vlákno nyní bude v aktivním stavu delší dobu, než je perioda časovače. Například 8 časových cyklů. Jak bude vypadat průběh signálu?

Signál se chová opět dost neočekávaně. 2,66 sekundy se nic neděje. Poté dojde k rychlému probliknutí. Následují další rychlá probliknutí vždy s periodou 3 sekundy. Podívejme se na průběh programu.
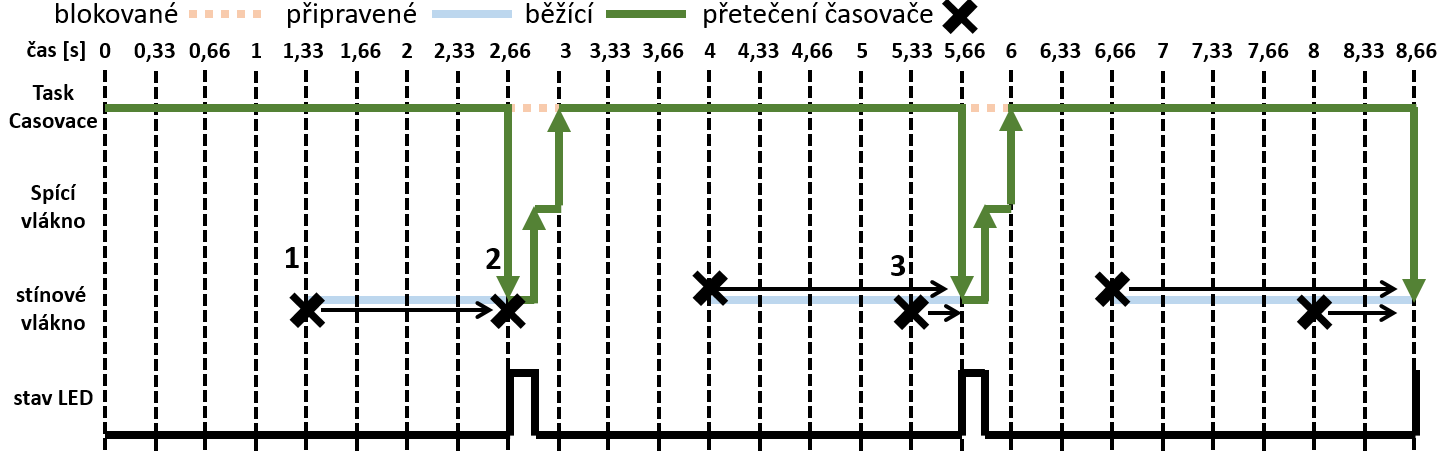
V bodě (1) dojde k přetečení časovače a systémové přerušení pošle do fronty časovače příkaz k provedení obsluhy časovače ve stínovém vláknu. To se ale dostane ke slovu až v bodě (2), kdy proběhne další přetečení. Obsluha časovače a volaní callback funkce tedy proběhne dvakrát. V bodě (3) už jsou ve frontě příkazů k provedení obsluhy 2 záznamy čekající na vyzvednutí. Toto se dále opakuje.
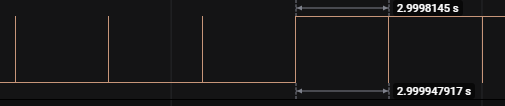
Při tomto nastavení se jednou za čas ve frontě příkazů časovače nachází dokonce 3 záznamy a callback proběhne třikrát, jak je vidět na tomto průběhu signálu.
Když by vlákna s vyšší prioritou nepustila ke slovu obsluhu časovače příliš dlouho, může se stát, že se fronta příkazů časovače naplní. V ten moment přejde program do chybové nekonečné smyčky. Velikost paměti pro frontu příkazu časovačů udává parametr TIMER_TASK_STACK_DEPTH.
Jak tento příklad ukázal, musíme být velmi obezřetní při práci s časovači, jinak se budou chovat naprosto neočekáváným způsobem.
